Optimizing a 1D function – trisection algorithm
Optimization problems take the classical form

Not all such problems have explicit solution, therefore numerical algorithms may help approximate potential solutions.
Numerical algorithms generally produce a sequence which approximates the minimizer. Information regarding function values and its derivatives are used to generate such an approximation.
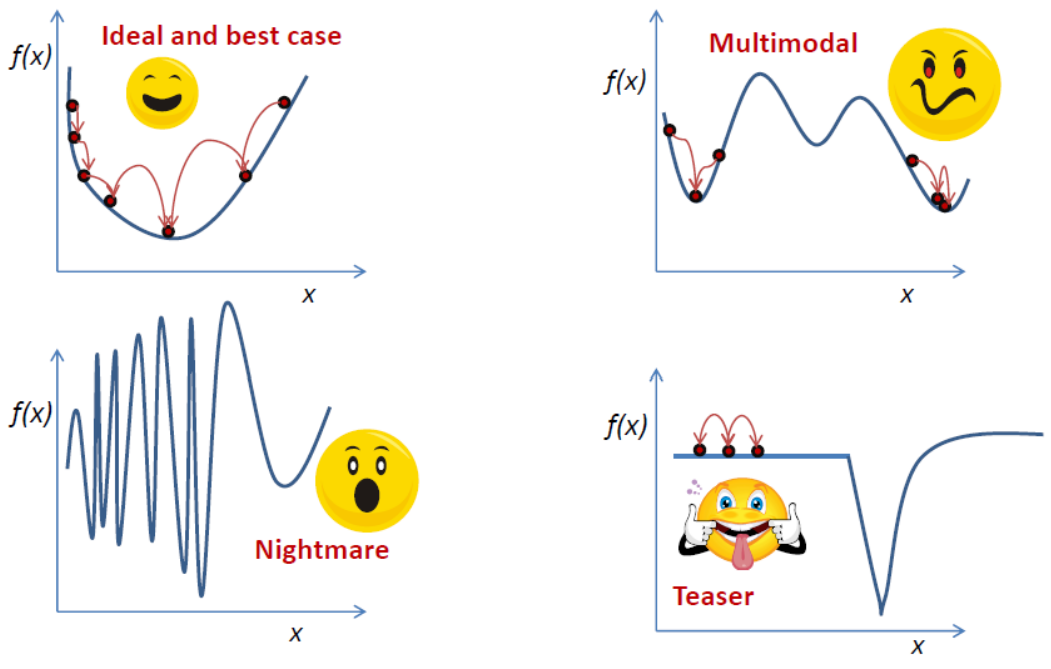
The easiest context is one dimensional optimization. The basic intuition regarding optimization algorithms starts by understanding the 1D case. Not all problems are easy to handle for a numerical optimization algorithm. Take a look at the picture below:
For simplicity, let us assume that ![{f : [a,b] \rightarrow \Bbb{R}}](https://s0.wp.com/latex.php?latex=%7Bf+%3A+%5Ba%2Cb%5D+%5Crightarrow+%5CBbb%7BR%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![{x^*\in [a,b]}](https://s0.wp.com/latex.php?latex=%7Bx%5E%2A%5Cin+%5Ba%2Cb%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)

![{[a,x^*]}](https://s0.wp.com/latex.php?latex=%7B%5Ba%2Cx%5E%2A%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![{[x^*,b]}](https://s0.wp.com/latex.php?latex=%7B%5Bx%5E%2A%2Cb%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)
Furthermore, suppose that we can only compute values 
- the function value might come from an experiment.
- the value might be related to a solution of a mathematical model which is hard to differentiate
- the function may simply come from a black box device. We have a way to obtain values, but not derivatives.
For such a function (assuming it is unimodal, it has a unique local minimum) it is possible to devise a bracketing algorithm for finding the minimizer 
![{[a,b]}](https://s0.wp.com/latex.php?latex=%7B%5Ba%2Cb%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)
A quick inspection shows that one function evaluation does not give enough information. Suppose that
![\displaystyle x^-, x_+ \in [a,b], x^-<x^+.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+x%5E-%2C+x_%2B+%5Cin+%5Ba%2Cb%5D%2C+x%5E-%3Cx%5E%2B.&bg=ffffff&fg=000000&s=0&c=20201002)
Then:
- if
the minimizer cannot lie in
. Therefore
is a guaranteed inclusion for
- if
the minimizer cannot lie in
. Therefore
is a guaranteed inclusion for
This gives rise to a straightforward iterative algorithm. All we need is a systematic way of choosing 

The simplest idea is to use the trisection algorithm where 

def Trisection(fun,A,B,tol=1e-6,ubFeval=10):
nfeval = 0
lbhist = []
ubhist = []
x1hist = []
x2hist = []
lb = A
ub = B
lbhist.append(lb)
ubhist.append(ub)
while ub-lb>tol:
x1 = 2/3*lb+1/3*ub
x2 = 1/3*lb+2/3*ub
v1 = fun(x1)
nfeval = nfeval+1
if nfeval>=ubFeval:
break
v2 = fun(x2)
nfeval = nfeval+1
if v1<=v2:
ub=x2
else:
lb=x1
x1hist.append(x1)
x2hist.append(x2)
lbhist.append(lb)
ubhist.append(ub)
if nfeval>=ubFeval:
break
return np.array(lbhist),np.array(ubhist),np.array(x1hist),np.array(x2hist),nfevalSince the error estimate 
![{[a_n,b_n]}](https://s0.wp.com/latex.php?latex=%7B%5Ba_n%2Cb_n%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)

we say that this algorithm converges linearly.
One drawback of trisection algorithm is that two function evaluations are made at every iteration. This can be improved with a slight modification which we’ll cover soon.
Beni Bogoşel

Click to see my CV
Today’s Visitors

Click for more info
